
The Biomechanics of Terrestrial Locomotion
John Merck
Walking an running animals encompass terrific diversity and, in contrast to swimming:
- Air's viscosity os so low that Reynold's number is unimportant
- terrestrial locomotion involves the complex interaction of many moving parts whose identity and proportions vary across taxa.
- The common requirements of all walkers
- The factors that make walkers different.
Common requirements:
- Support
- Stability
- Propulsion
- Maneuverability
Stability: The limbs that touch the ground form a base of support (right) that encompasses the animal's center of mass when it is standing or walking.
Propulsion: Animals don't just stand there. The limb must be able to exert lateral force against the ground, causing the animal to move in reaction.
Maneuverability: The animal must be able to vary the size and direction of the locomotor force it exerts in order to accelerate, turn, and stop without excessively sacrificing stability. Note: A running animal is essentially always falling and catching itself. It is deliberately sacrificing support for speed and maneuverability.
Sources of difference:
- Posture
- Proportions
- Locomotor ecology
- Scaling effects
Posture: Major issues:
- Number of limbs dedicated to locomotion.
- Arthropods with six or more legs have few concerns about stability, as they are able to maintain a triangle of support with at least three legs, even when running.
- Quadrupeds: Most land vertebrates
- Bipeds: Obligate bipedalism evolved in:
- Poposaurid archosaurs
- dinosaurs
- hominids
- But note, many living squamates, and extinct reptiles show "facultatively bipedalism" - they can switch between bipedal and quadrupedal locomotion. Indeed, quadrupeds with a major size disparity between fore and hindlimbs may be more nearly quadrupedal at low speeds, and effectively bipedal at high speeds, when their forelimbs can't keep up.
- Sprawling vs. erect:
- Sprawling limbs have their proximal portions extend laterally from the body and the feet are planted well to the side of the torso. In a typical sprawling animal:
- the torso is "slung" between the organism's legs
- Even standing still, sprawling limbs are typically subjected to large shearing loads, and support muscles that must exert constant force.
- Well-suited to exploiting lateral undulations of the torso for locomotor force.
Limb contribution:
- A sprawler could move forward using the power of its axial muscles, even if the limbs acted merely as props.
- Of course for most, the limb motion and axial flexion act in concert.
- In extreme cases, the limbs provide all of the locomotor force.
- Salamanders
- Turtles
- Squamates and the tuatara
- Crocodylians sometimes

- Erect limbs extend vertically from the torso and the feet are planted underneath it.
- The torso is effectively balanced on top of the limbs.
- When standing still, the limbs must resist compression but are subject to fewer torsional loads.
- Require less robust limb skeletons, compared to sprawlers of similar mass.
- Locomotor force derives mostly from muscles that move the limb directly.
Examples:
- Therian mammals: Once, just prior to the last common ancestor of marsupials and placentals. (Living monotremes are semierect and fossil ones are poorly known.)
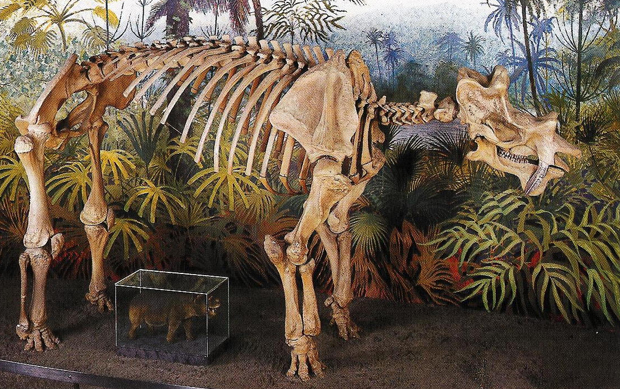
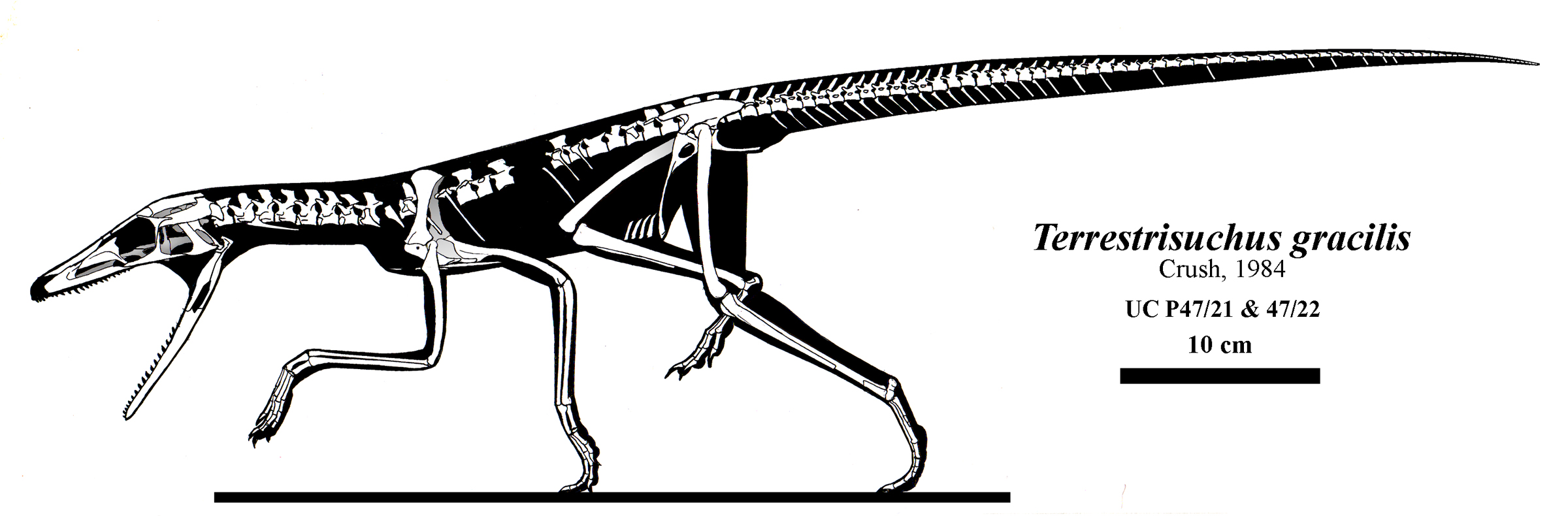
- "Rauisuchian grade" Archosaurs: Land predators close to the ancestry of living crocodylians. - Extinct.
- Dinosauromorph Archosaurs: Dinosaurs and their close kin. Birds are modern survivors.
- Semierect: Many vertebrates have semierect limbs, in which the feet are close to the torso but not directly beneath it. Seen in fossil creatures on an evolutionary trajectory toward uprightness. E.G. many non-mammalian synapsids, or mammals whose limbs function in behaviors other than simple walking. E.G. mole, platypus, sea-lion on land.
- Variable: Modern crocodylians can choose between an upright and sprawling stance, depending on the needs of the moment.
{kind=link}
{kind=link}
{kind=link}
Ecology: Regardless of gait, we can divide all terrestrial locomotion into:
- walking: in which each foot is on the ground for at least half of the step cycle
- running: in which each foot is on the ground for less than half of the step cycle.
- An input lever - the distance from the joint to the insertion of the muscle that moves the limb
- An output lever - the distance from the joint to the part of the foot that touches the ground.
- Speed is more important than strength, thus, the limb is typically long and the input lever short.
- Distal sections of the limb tend to be longer in comparison to proximal.
- Only the most distal parts of the foot touch the ground. thus, cursorial animals tend to be:
- Digitigrade: with only toes touching the ground
- Unguligrade: with only hooves (i.e. toenails) touching the ground
- Strength is more important than speed, thus, the limb is typically short and the input lever long.
- Proximal sections of the limb tend to be longer in comparison to distal.
- Larger parts of the distal limb contact the ground - plantigrade.
These modes place different biomechanical demands on the organism. Not surprisingly, animals evolve distinct adaptations for a continuum of behaviors ranging from cursorial - adaptated to running - to graviportal adapted to moving a large mass at a walking pace.
In terrestrial locomotion, these issues are compounded by biomechanical demands of moving a limb. As a first-order approximation, we can think of a limb as a lever with:
For cursors:
For graviportal animals:
These factors, together, give us.
Gait. Depending on the foregoing factors and the specific demands of the moment, animals choose between distinct gaits, repeated patterns of footfalls, including:
- Walking - one foot always on ground at any point
- Trotting - Alternating support by diagonally opposite feet with suspended phase
- Galloping - Feet strike the ground each in their own time, with suspended phase.
A running specialist may choose gaits that a non-runner would avoid.
large animals operate under stricter biomechanical limitations than small ones.
Scaling effects: We have previously discussed the responses of organisms to the demands of increasing size:
- Scaling with mechanical similarity in which the limbs scale strongly allometrically with respect to the body.
- Modification of behaviors to reduce loading
The demands of moving a walking limb compounds these issues because More robust limbs capable of supporting a large animal scaling with mechanical similarity must be moved by larger muscles that consume more energy.
For this reason, larger animals are more likely to give up on cursoriality and become specialized for graviportal walking. There are exceptions: E.G.: Giganotosaurus vs Tyrannosaurus, theropods of similar size.
{kind=link}
{kind=link}
Energy storage:
Many terrestrial animals conserve energy by storing it in some way. Two significant strategies:
- Allowing the limb to move as a pendulum: The oscillatory period of a pendulum is a function of its length. The moving leg of an upright animal resembles a pendulum. Indeed, an animal can save some energy by allowing its limb to swing naturally, as a pendulum, for as much of its stride cycle as possible. This enables us to predict the duration of it's "typical" stride cycle. Although living animals vary their stride cycles considerably, mean stride cycle durations tend to conform to their predictions based on pendulums. Thus, when an animal changes speed, it is more likely to vary its stride length than it is the amount of time it takes to complete a stride. The relative stride length (i.e. relative to the height of the hip) combines with its pendulum dynamics to gives a good approximation of its absolute speed from ancient trackways.
- Employing ligaments and tendons as springs: Rather than simply being transmitted to the ground, the energy of a footfall can be stored in a spring-loaded tendon or ligament and employed to help power the next step. Examples:
- "Achilles tendon": Generic term for the tendons connecting the extensors of the foot (i.e. the "drumstick" msucles of the calf) with the heel and toe. When the mammal steps down, this tendon is stretched. The stored energy is released when the tendon recoils during the next step.

Tyrannosaurid foot (left)
Allosaurus foot (right) - The Arctometatarsus: Tyrannoasurus is not only different in the length of its metatarsals, but also in their configuration. It, along with some other cursorially adapted theropod dinosaurs, has a wedge-shaped third metatarsal. It is speculated that it was attached to the adjacent metatarsals by elastic ligaments that stretched, storing energy, when the creature stepped down. Their recoil would push the middle toe downward, assisting in the next step.
- "Achilles tendon": Generic term for the tendons connecting the extensors of the foot (i.e. the "drumstick" msucles of the calf) with the heel and toe. When the mammal steps down, this tendon is stretched. The stored energy is released when the tendon recoils during the next step.
{kind=link}
Torso flexion:
Of course, not all locomotor power comes from the limbs. We've seen how axial flexion aids locomotion in sprawlers. Even cursorial upright walkers often use flexion of the torso in the sagittal plane to assist locomotion.
Examples




Additional reading: